

II - QUELS OUTILS SONT UTILISéS POUR L'OBSERVATION?
2- Les instruments
2.2- Principaux types d'instruments
Instruments passifs
Les capteurs imageurs passifs utilisent la lumière naturelle disponible pour produire des images des objets. Ils ne disposent donc pas de leur propre source de lumière (voir Caractéristiques des instruments - Capteurs passifs et capteurs actifs). Les capteurs passifs font des observations dans différentes parties du spectre, mais sont principalement optiques. La partie optique du spectre électromagnétique couvre le rayonnement compris entre 0,3 et 14 micromètres. Cela inclut donc l'ultraviolet, le visible et l'infrarouge. Nous appelons cette partie du spectre "optique" car les lentilles et les miroirs peuvent réfracter ou réfléchir cette énergie.
Les instruments optiques fréquemment utilisés sont les "scanners multispectraux". On les trouve à bord de plateformes satellitaires telles que Landsat, MODIS, Sentinel-2&3, SPOT, Pléiades, Worldview, ... mais ils sont aussi souvent utilisés pour l’imagerie aérienne numérique. Ils disposent d'un nombre relativement limité de canaux spectraux assez larges ; généralement, au minimum des canaux dans le bleu (Blue), le vert (Green), le rouge (Red) et le proche infrarouge (Near InfraRed). Ceux-ci peuvent être utilisés pour produire des images en couleurs vraies (R-G-B) ou des composites fausses couleurs (NIR-R-G par exemple). L'instrument MSI (Multi-Spectral Imager) à bord de Sentinel-2, l'OLCI (Ocean and Land Colour Instrument) de Sentinel-3 et l'OLI-2 (Operational Land Imager) de Landsat 9 comptent également un certain nombre de canaux supplémentaires dans d'autres parties du proche infrarouge ou de l'infrarouge à ondes courtes (SWIR). Les satellites Landsat et Sentinel-3 sont également pourvus d'instruments (respectivement TIRS et SLSTR) qui peuvent observer dans l'infrarouge thermique (TIR).
Il existe également des instruments hyperspectraux qui, contrairement aux capteurs multispectraux, peuvent effectuer des observations dans un très grand nombre de bandes spectrales relativement étroites. Citons par exemple AVIRIS (Airborne Visible/Infrared Imaging Spectrometer) avec 224 canaux spectraux contigus dans une gamme de longueurs d'onde comprises entre 400 et 2500 nanomètres ou APEX (Airborne Prism Experiment, développé par un consortium belgo-suisse) avec environ 300 canaux et la même gamme de longueur d'onde. Bien que ces instruments spécifiques ne soient utilisés qu'à bord des avions, des capteurs hyperspectraux sont également embarqués à bord de satellites. Par exemple, le satellite hyperspectral allemand EnMap (Environmental Mapping and Analysis Program) présente des caractéristiques similaires en termes de longueurs d'onde et de nombre de canaux, mais les images auront une résolution spatiale moindre que les images aériennes.
Il existe également des capteurs passifs qui peuvent détecter les rayonnements émis par la Terre elle-même dans la gamme des micro-ondes. Toutefois, le niveau d'énergie de ces derniers est si faible que ce rayonnement doit être collecté sur une zone plus étendue ; ces données offrent donc peu de détails spatiaux. Ces instruments sont utilisés pour l'observation à long terme de la glace de mer, la détermination des changements dans l'humidité du sol ou la salinité de la surface de la mer. Citons par exemple l'AMSR (Advanced Microwave Scanning Radiometer-Earth Observing System) ou l'instrument MIRAS (Microwave Imaging Radiometer with Aperture Synthesis) utilisé dans la mission SMOS (Soil Moisture and Ocean Salinity) de l'ESA.
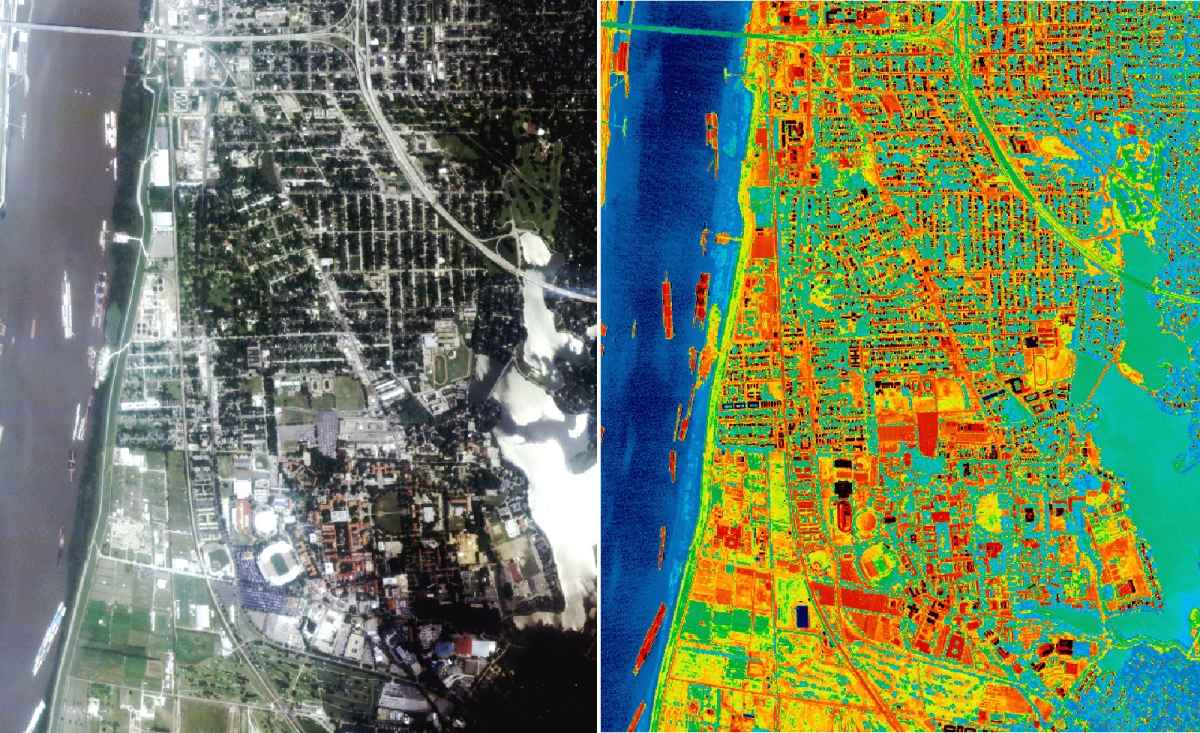
Images aérienne RGB (à gauche) et infrarouge thermique (à droite) de Baton Rouge, Los Angeles. Les zones jaunes et rouges sont chaudes et correspondent généralement aux routes et aux bâtiments ; les zones bleues et vertes sont froides et correspondent à l'eau et à la végétation. Sur cette image, les zones rouge vif ont une température d'environ 65 °C ; les zones vertes et bleues foncées sont à environ 25 °C. La bande de couleur bleue qui s'écoule sur le côté gauche est le fleuve Mississippi. Courtesy of NASA-Marshall Space Flight Center-Global Hydrology and Climate.
Un radiomètre composé de cellules sensibles au rayonnement infrarouge thermique enregistrera des valeurs plus élevées dans les zones les plus chaudes. Si la convention de codage des pixels est "0 = noir, 255 = blanc", ces zones chaudes correspondront aux parties claires de l'image. On peut bien sûr aussi choisir d'autres échelles de couleurs. Dans l'exemple ci-dessus, les zones chaudes sont représentées en rouge et les zones froides en bleu.
Capteurs actifs: RADAR & LiDAR
Un capteur actif envoie un signal électromagnétique pour "éclairer" le terrain. Les objets présents à la surface interagissent avec ce rayonnement et, en fonction de leurs propriétés physiques, en renvoient une partie vers le capteur qui enregistre l'observation. Les capteurs actifs ne dépendent donc pas de la lumière du Soleil, ni des conditions météorologiques et peuvent fonctionner 24 heures sur 24 (voir Sources de rayonnement). Les capteurs actifs les plus souvent utilisés en télédétection sont le SAR (Synthetic Aperture Radar) ou le LiDAR (Light Detection and Ranging).
RADAR
RADAR est l'abréviation de RAdio Detection And Ranging. Cette technologie, développée autour de la seconde guerre mondiale, est utilisée pour déterminer la distance, l'angle ou la vitesse d'un avion, d'un navire, ou d’un autre objet en mouvement en se basant sur des ondes radio ou des micro-ondes. Les radars imageurs utilisés en télédétection (SAR) opèrent dans la portion micro-ondes du spectre électromagnétique (longueur d'onde de 1 mm à 1 mètre), au-delà des régions visibles et infrarouges thermiques.
La scène à “photographier” est donc illuminée, non pas par de la lumière mais par des faisceaux micro-ondes. Les micro-ondes interagissent avec les objets à la surface de la Terre d'une manière différente de la lumière visible ou infrarouge. L'intensité du signal retour par rapport au signal émis (appelée rétrodiffusion) dépend principalement de la rugosité, de la forme et des propriétés diélectriques (permittivité électromagnétique) de l'objet observé, ainsi que des propriétés du système SAR lui-même. Les images micro-ondes contiennent beaucoup d'informations utiles sur la couverture du sol et la teneur en humidité, mais sont plus difficiles à interpréter que les images optiques.
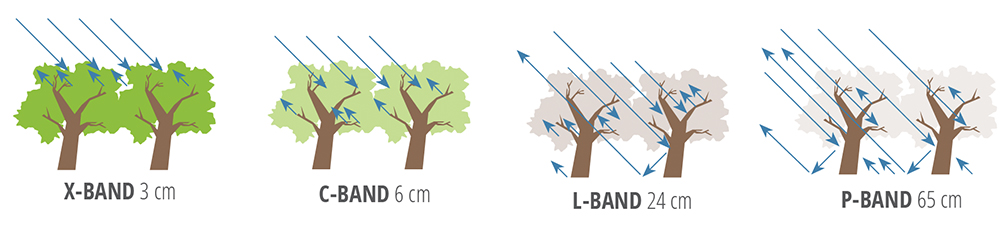
La longueur d'onde utilisée par le système radar détermine la profondeur à laquelle le signal peut pénétrer dans le feuillage. Les ondes plus courtes interagissent principalement avec les feuilles individuelles, tandis que les ondes plus longues peuvent pénétrer jusqu'au sol. Source: NASA SAR Handbook
Les capteurs SAR embarqués à bord d'avions ou de satellites sont des radars à synthèse d’ouverture: l'antenne radar se déplace avec la plateforme au-dessus de la zone cible lorsqu'elle est illuminée par les micro-ondes. Cela crée une antenne artificiellement grande qui peut fournir des images avec un niveau de détail spatial beaucoup plus élevé que ce qui serait possible avec une antenne physique de même taille mais stationnaire.
Deux images SAR prises sous des angles légèrement différents peuvent également former une paire dite interférométrique. Les différences de phase entre les deux signaux renvoyés peuvent être utilisées pour créer des cartes numériques d'élévation, pour détecter des changements de terrain ou pour augmenter encore la résolution dans la direction de visée de l'antenne.
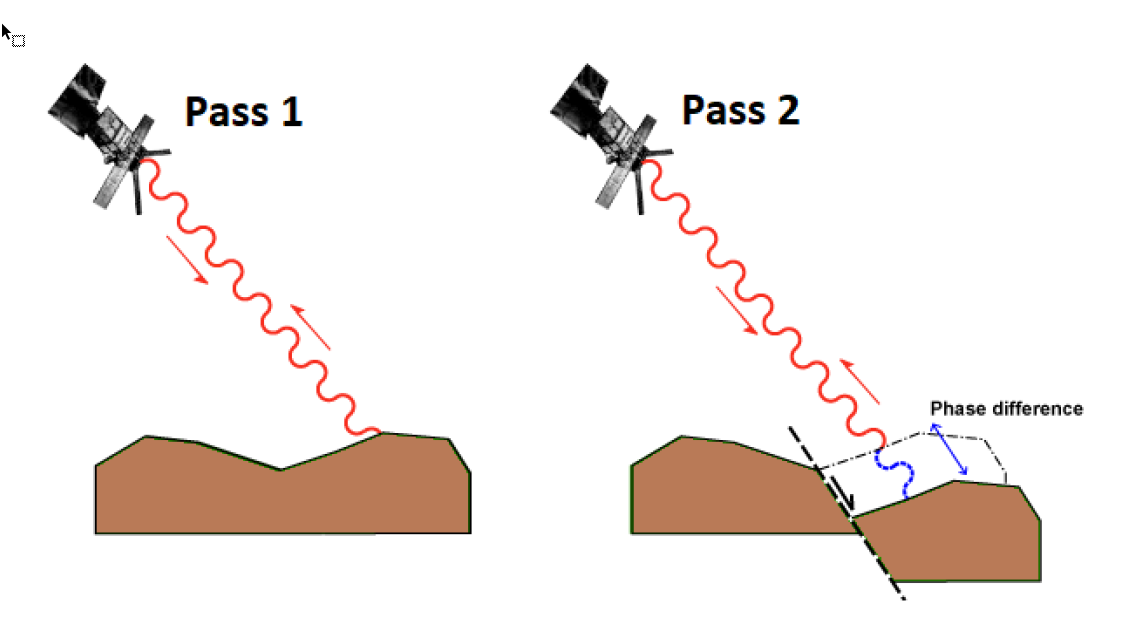
Principe de l'interférométrie SAR (InSAR) : en mesurant la différence de phase entre deux images radar, on peut déterminer les changements de distance entre le sol et le satellite. Source: Castellazzi et al. (2020). Ground displacements in the Lower Namoi region. 10.13140/RG.2.2.20466.53442
|
Contrairement aux capteurs passifs, qui mesurent la lumière séparément dans plusieurs intervalles du domaine optique, les capteurs SAR opèrent généralement dans une seule longueur d'onde spécifique. Par exemple, le satellite européen Sentinel-1 opère autour d'une longueur d'onde centrale d'environ 5,55 cm dans une gamme appelée la bande C (3,8 cm - 7,5 cm). Les capteurs SAR opérant dans la bande K (1,1 cm - 1,7 cm), tels que COSMO-SkyMed, sont adaptés à la cartographie détaillée car ils fournissent des images avec une grande résolution spatiale. Cependant, le signal qu'ils émettent se dégrade plus rapidement dans les zones où il y a beaucoup de végétation, car il ne peut pas pénétrer profondément dans le feuillage. Le capteur PALSAR2 à bord du satellite japonais ALOS2 utilise quant à lui des longueurs d'onde plus grandes dans la bande L (15 cm – 30 cm), ce qui permet d'obtenir des images plus cohérentes dans le temps, surtout dans les zones où la végétation est abondante. En revanche, leur niveau de détail spatial est beaucoup plus faible. |
LiDAR
Un autre exemple de capteur actif est le LiDAR. Ce terme est l’acronyme de Light (ou Laser Imaging) Detection And Ranging, ou détection et télémétrie par ondes lumineuses et est utilisé comme terme générique pour la détection et la détermination de la distance d'un objet à l'aide de la lumière laser. Il s’agit d’une technique de télédétection active qui utilise la lumière dans les longueurs d'onde de l'infrarouge, du visible ou des UV, sous la forme d'un laser pulsé pour mesurer des distances. La mesure du temps requis par le faisceau lumineux pour atteindre la cible et revenir à l’émetteur-récepteur permet de déterminer la distance entre les deux.
Le LiDAR permet de collecter des points tridimensionnels (x, y, z) très précis (appelés "nuages de points") permettant d’obtenir des informations détaillées sur la forme de la Terre et ses caractéristiques de surface.
|
Les premières expériences utilisant la lumière pour déterminer des distances remontent aux années 1930, dans le cadre d’études de l'atmosphère et de détermination de la hauteur des nuages. Après l'invention du laser dans les années 1960 et les développements ultérieurs liés aux applications militaires (notamment la détection de cibles) et aux investissements de la NASA (exploration du système solaire), la technologie est devenue suffisamment avancée pour produire des modèles d'élévation très détaillés. Depuis la généralisation des systèmes GNSS (connu en général sous le nom d’appareil GPS) et des dispositifs de mesure de l’inertie à bord des avions (centrales à inertie ou inertial measurement units), les systèmes LiDAR sont souvent utilisés pour collecter des données de positionnement topographique précises. Aujourd'hui, la technologie du balayage laser, en constante évolution, est utilisée dans un large éventail de disciplines et d'applications scientifiques : estimation de l'impact des catastrophes naturelles (glissements de terrain, coulées de lave, inondations...), surveillance des bassins fluviaux, des rivières et des plaines inondables, projets environnementaux, géomorphologie, travaux d'infrastructure, recherche archéologique…. |