

II - QUELS OUTILS SONT UTILISéS POUR L'OBSERVATION?
2- Les instruments
2.1- Caractéristiques des instruments
Capteurs analogiques et capteurs numériques
Les premières images aériennes et satellitaires de la surface terrestre ont été prises de manière analogique à l’aide d’appareils photographiques utilisant des films, donc des émulsions chimiques photosensibles (sensibles à la lumière visible et pour certains, au proche infrarouge). Ces photographies aériennes ou satellitaires ont été longtemps interprétées de façon visuelle. Par la suite, elles ont été scannées et traitées numériquement.
A partir des années 1970, les satellites d’observation de la Terre ont embarqué des radiomètres imageurs. Ceux-ci convertissent l’intensité de l’énergie électromagnétique reçue, pour chaque bande spectrale et pour chaque pixel de l’image, en signal électrique et puis en valeur numérique. L’enregistrement au format digital (ou numérique) ouvre progressivement l’analyse à d’autres parties du spectre électromagnétique que le visible et le proche infrarouge. De plus, les enregistrements effectués peuvent être transmis sur Terre par radio, d’un satellite à une antenne de réception, sous forme d’une succession d’informations binaires. A la station de réception, les images sont restaurées et leur analyse peut bénéficier de techniques numériques de traitement d’image de plus en plus performantes.
Capteurs imageurs et non imageurs
Nous pouvons également diviser les capteurs utilisés en télédétection en capteurs imageurs et non imageurs. Un capteur non imageur mesure le rayonnement provenant de tous les points du champ de vision et l'intègre en une seule valeur. Le résultat est donc une mesure ponctuelle plutôt qu'une image puisqu'une seule valeur est générée par point observé.
Plusieurs instruments utilisés dans le domaine de la télédétection sont des instruments non imageurs. Par exemple, radiomètre, spectromètre et spectroradiomètre sont souvent utilisés pour l'étalonnage et ce, en laboratoire ou lors de campagnes de terrain pour déterminer les signatures spectrales détaillées de matériaux ou objets donnés. Pour chaque type de matériau ou d’objet présent dans une zone d'étude, nous pouvons mesurer la quantité de lumière qu'il réfléchit dans certaines parties du spectre.
Un autre capteur non imageur fréquemment utilisé est le LiDAR, qui permet d'effectuer des mesures de hauteur et de distance par laser. Avec le LiDAR, on obtient un nuage de points dans l'espace qui est créé par la réflexion sur les objets dans cet espace.
|
Un capteur non imageur mesure le rayonnement provenant de tous les points du champ de vision et l'intègre en une seule valeur. Par conséquent, aucune image n'est formée. Nous pouvons considérer qu'il s'agit de données ponctuelles car une seule valeur est obtenue à partir d'un point d'observation donné. Un radar Doppler mobile ou un pistolet-radar déployé par la police pour contrôler la vitesse est un exemple de capteur actif non imageur. L'appareil émet des impulsions de rayonnement et les données générées sont simplement les vitesses des véhicules qui passent. Aucune image n'est prise par ce dispositif ; si nécessaire, elles peuvent être prises par des caméras de contrôle. Les capteurs imageurs, quant à eux, mesurent le rayonnement en divers points de la cible et ces informations peuvent être traitées pour produire une image. Il existe deux principaux types de capteurs imageurs : le CCD (Charge Coupled Device) et le capteur à pixels actifs ou CMOS (Complementary Metal-Oxide Semiconductor). |
Les capteurs imageurs forment une image numérique de leur champ de vision qui reflète les différences spatiales d'intensité du rayonnement reçu. Ils le font essentiellement en convertissant le rayonnement électromagnétique en une charge électrique par le biais d'un circuit intégré composé d'un grand nombre de condensateurs.
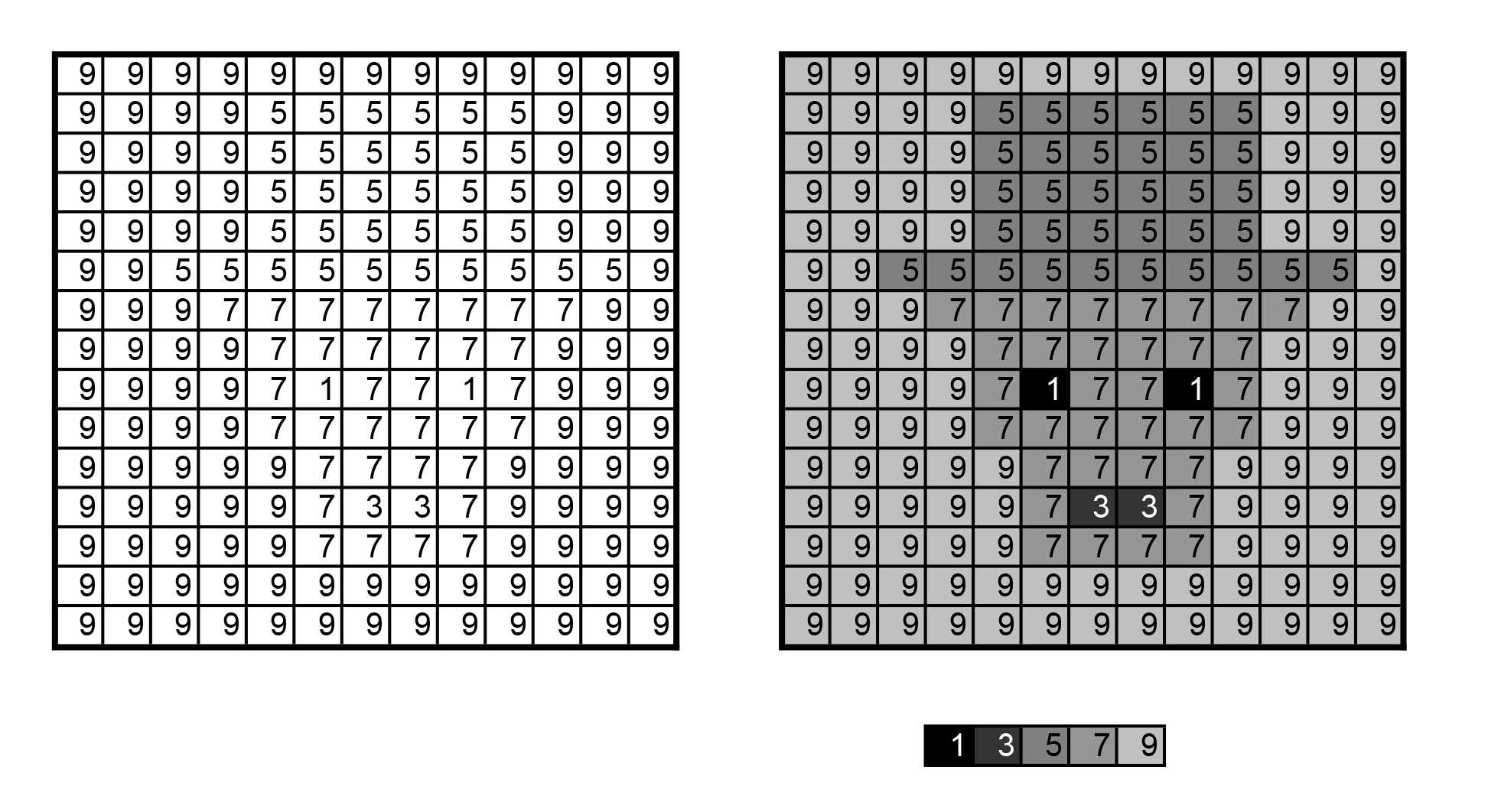
Une image numérique peut être imaginée comme une matrice de chiffres où chaque chiffre représente l'intensité du rayonnement détecté par le capteur à l'endroit correspondant à une cellule particulière de la matrice. Une cellule de la matrice est appelée un pixel. Les capteurs imageurs utilisés en télédétection produisent généralement des images composées de plusieurs matrices.
En d'autres termes, il existe plusieurs valeurs pour chaque pixel. Cela est dû au fait que nous mesurons l'énergie réfléchie (ou émise) dans différentes parties du spectre. Par exemple, une image provenant des satellites Pléiades sera composée de 4 matrices d'images: une pour la partie bleue, une pour la partie verte, une pour la partie rouge et une pour la partie infrarouge de la lumière. Les capteurs imageurs peuvent être divisés en capteurs optiques (y compris infrarouge thermique) ou radar, selon la partie du spectre dans laquelle ils prennent des mesures.
Capteurs passifs et capteurs actifs
Traditionnellement, la télédétection fait la distinction entre les capteurs actifs et les capteurs passifs. Les capteurs passifs utilisent la lumière naturelle. En d'autres termes, ils mesurent le rayonnement électromagnétique réfléchi ou émis naturellement par les objets à la surface de la Terre. Il peut s'agir, par exemple, du rayonnement proche infrarouge provenant du Soleil et réfléchi par les feuilles d’un arbre ou du rayonnement infrarouge thermique émis par des toits mal isolés.
Les capteurs actifs, quant à eux, utilisent leur propre énergie pour "éclairer" une partie de la surface terrestre. Le rayonnement émis qui revient au capteur après avoir interagi avec les objets sert alors de base à l'observation. Les capteurs actifs utilisent certaines micro-ondes (radar) ou la lumière visible et proche infrarouge (par exemple, télémètre laser, LiDAR). Il n'est pas inconcevable qu'à l'avenir, avec l'évolution de la technologie des capteurs, la frontière entre capteurs actifs et passifs s'estompe par intégration des deux méthodes.
Ces deux types d'instruments sont décrits plus en détails à la section 'Principaux types d'instruments'.
Capteurs à vision angulaire et capteurs à vision en distance
Un instrument optique fonctionne comme l'œil humain et possède une vision angulaire. Cela permet de distinguer des objets qui se trouvent à des angles différents, quelles que soient les distances auxquelles ils se trouvent. En revanche, un instrument actif, comme le radar, mesure des distances et non des angles. Par conséquent, deux objets se trouvant à la même distance du capteur sont représentés dans le même pixel de l'image, même s'ils sont positionnés à des angles différents par rapport au capteur.
|
|
|
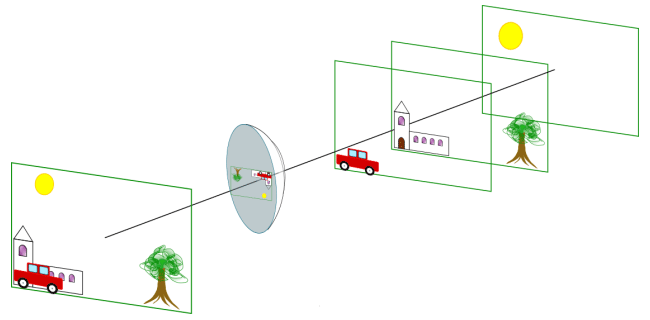
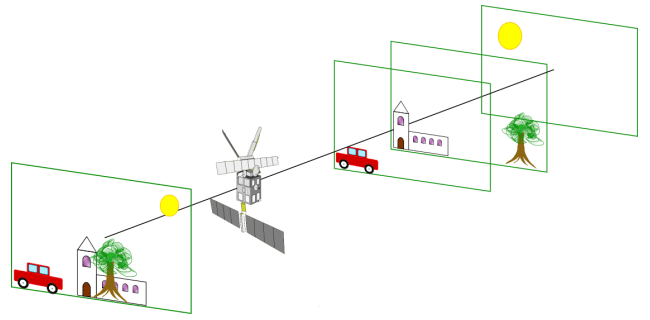
Vision angulaire et vision en distance schématisées - © Dominique Derauw
Cette différence de mode d'acquisition des images entraîne différents types de distorsions pour les deux méthodes. Les images optiques nous semblent plus naturelles car elles sont acquises par des systèmes similaires à l'œil humain. En revanche, les images radar nous apparaissent comme déformées. Cependant, les deux méthodes d’enregistrement nécessitent d’être corrigées afin de pouvoir projeter les images obtenues dans un système cartographique commun.
Capteurs across et capteurs along
A la différence des enregistrementss photographiques (analogiques), les systèmes de télédétection numériques utilisent des scanners. Un scanner est composé de capteurs imageurs avec un champ de vision instantané étroit (IFOV: Instantaneous Field of View) qui balayent systématiquement le terrain à observer. Ils composent ainsi une image bidimensionnelle de la surface terrestre située sous l'avion ou le satellite pour une zone appelée fauchée (swath en anglais). Ce balayage peut être effectué de deux manières : perpendiculairement à la trajectoire de vol (whiskbroom) ou le long de celle-ci (pushbroom).
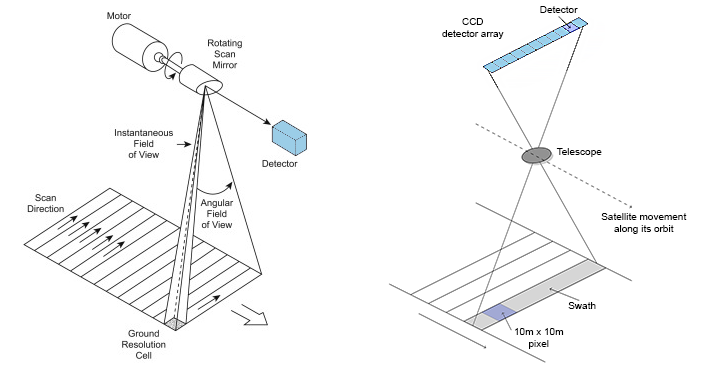
Deux méthodes de balayage : perpendiculairement à la trajectoire de vol (à gauche) et le long de la trajectoire de vol (à droite)
Source: Grundlagen Fernerkundung - 7 -Earth Resource Satellites – part I
Les scanners de type whiskbroom balaient la surface de la Terre en une série de lignes perpendiculaires à la direction du mouvement de la plateforme. Un miroir rotatif déplace le champ de vision d'un côté à l'autre du capteur tandis que la plateforme poursuit sa course. Les lignes de balayage successives forment ainsi une image bidimensionnelle de la Terre. Les capteurs des premiers satellites Landsat utilisaient cette technique de balayage. Bien que l'étalonnage en soit plus facile, la vulnérabilité des pièces en mouvement rapide s'est avérée être le principal inconvénient de cette technique.
À la suite de problèmes liés à un correcteur de ligne de balayage défectueux sur Landsat 7, les successeurs Landsat 8 et 9 ont été équipés d'un système pushbroom qui balaie le long de la trajectoire de vol. Ces systèmes utilisent également le mouvement vers l'avant de la plateforme pour balayer des lignes successives perpendiculaires à la direction du vol. En lieu et place d’un miroir moblie, ils sont équipés d'un grand nombre de détecteurs fixes et alignés permettant d'observer toute la bande en une seule fois. Ces systèmes sont plus légers et les détecteurs restent plus longtemps au-dessus d'une zone donnée, mais ils sont plus difficiles à calibrer. Les homologues européens des Landsat, les satellites Sentinel 2, utilisent également ce type de système.