

II - WELKE INSTRUMENTEN ZIJN GEBRUIKT VOOR OBSERVATIE?
2- instrumentEN
2.1- Kenmerken van de instrumenten
Analoog en Digitale sensoren
De eerste lucht- en satellietbeelden van het aardoppervlak werden analoog genomen met behulp van camera’s op basis van fotografische film. Dergelijke films bestonden uit lichtgevoelige chemische emulsies en konden op die manier het zichtbaar licht (en eventueel het nabij-infrarood) vastleggen. Gedurende lange tijd werden dergelijke lucht- of satellietfoto's uitsluitend visueel geïnterpreteerd. Later werden ze ook gescand en digitaal verwerkt.
Vanaf de jaren 1970 werden digitale, beeldvormende sensoren geplaatst aan boord van aardobservatiesatellieten. Deze zetten de intensiteit van de elektromagnetische energie die ontvangen wordt in een bepaalde spectrale band, op een bepaald deel van het aardoppervlak om in een elektrisch signaal dat vervolgens omgezet wordt naar een numerieke waarde. Opnamen in digitaal formaat maakten het mogelijk om andere delen van het elektromagnetische spectrum dan enkel het zichtbare licht en het nabij-infrarood te analyseren. Bovendien kunnen de gemaakte opnames via een radioverbinding van de satelliet naar de aarde worden verzonden en dit in de vorm van een opeenvolging van binaire informatie. In het ontvangststation worden de beelden samengesteld zodat ze geanalyseerd kunnen worden met behulp van digitale beeldverwerkingstechnieken. Deze verwerkingstechneieken werden doorheen de jaren steeds efficiënter.
Beeldvormende versus niet-beeldvormende sensoren
We kunnen de sensoren die gebruikt worden in teledetectie ook opdelen in beeldvormende en niet-beeldvormende types. Een niet-beeldvormende sensor meet de straling die afkomstig is van alle punten in het zichtveld en integreert deze tot één enkele waarde. Het resultaat bestaat dus eerder uit puntmetingen dan uit een beeld aangezien er maar één enkele waarde per geobserveerd punt gegenereerd wordt. Verschillende instrumenten die gebruikt worden in het domein van de teledetectie zijn niet beeldvormend. Een radiometer, spectrometer en een spectroradiometer zijn bijvoorbeeld toestellen die vaak gebruikt worden voor ijking. Ze worden ingezet in een labo of kunnen meegenomen worden tijdens veldonderzoek om gedetailleerde spectrale signaturen van bepaalde materialen te bepalen. Zo kunnen we bijvoorbeeld voor elk soort materiaal dat in ons studiegebied voorkomt meten hoeveel licht het weerkaatst in bepaalde delen van het spectrum.
Een ander vaak gebruikte, niet-beeldvormende sensor is lidar, waarmee laserhoogtemetingen en afstandsbepalingen uitgevoerd kunnen worden. Met lidar bekomt men een puntenwolk in de ruimte die ontstaat door de reflectie op de objecten in deze ruimte.
|
Een niet-beeldvormende sensor meet de straling die afkomstig is van alle punten in het zichtveld en integreert deze tot één enkele waarde. Er wordt bijgevolg geen beeld gevormd. We kunnen dit beschouwen als een puntgegeven aangezien er maar één enkele waarde bekomen wordt vanuit een bepaald observatiepunt. Een mobiele doppler-radar of speed-gun die door de politie opgesteld om de snelheid te controleren is een voorbeeld van een actieve, niet-beeldvormende sensor. Het toestel zendt stralingspulsen uit en de gegevens die gegenereerd worden zijn eenvoudigweg de snelheden van de voertuigen die passeren. Er worden geen beelden gemaakt door dit toestel, daar zorgt de flitscamera eventueel voor. Beeldvormende sensoren daarentegen meten straling op verschillende punten van het doel en die informatie kan verwerkt worden tot een beeld. Er zijn twee voorname types beeldsensoren: de CCD (charge coupled device) en de actieve pixel sensor of CMOS (complementary metal-oxide semiconductor). |
Beeldvormende sensoren vormen een digitaal beeld van hun zichtveld waarin ruimtelijke verschillen in de intensiteit van de ontvangen straling tot uiting komen. Ze doen dit in essentie door elektromagnetische straling om te zetten in een elektrische lading d.m.v. een geïntegreerde schakeling die bestaat uit een groot aantal condensatoren.
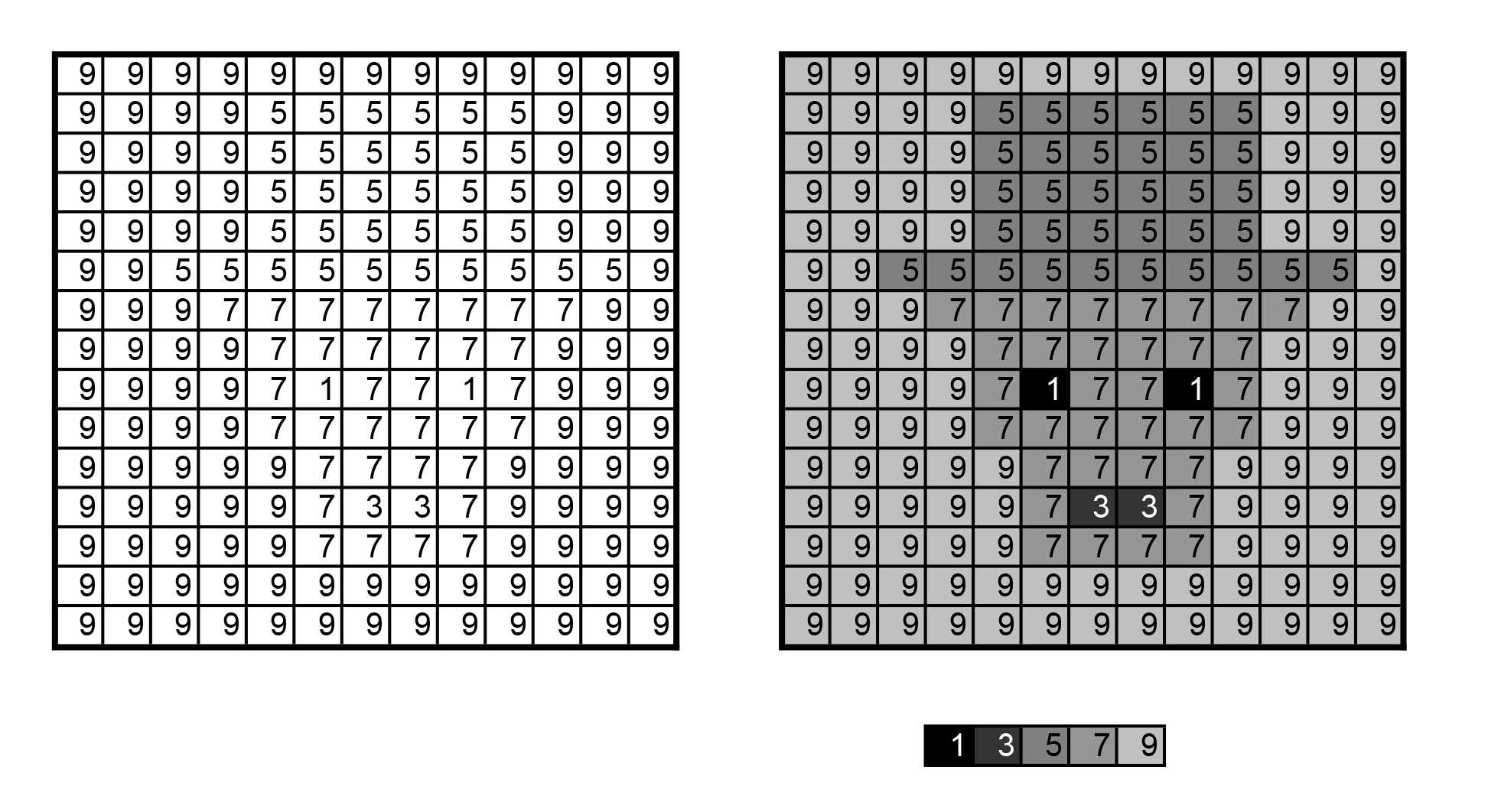
Een digitaal beeld kan je je voorstellen als een matrix van getallen, waarbij elk getal de intensiteit van de door de sensor waargenomen straling voorstelt op de plaats die overeenkomt met een bepaalde cel in de matrix. Een cel in de matrix noemen we een pixel. De beeldvormende sensoren die gebruikt worden voor teledetectie produceren meestal beelden die bestaan uit verschillende matrices. Er zijn voor elke pixel m.a.w. meerdere waarden. Dit komt omdat we de gereflecteerde (of uitgezonden) energie meten in verschillende delen van het spectrum. Zo zal een beeld van de Pléiades satellieten bestaan uit vier beeldmatrices: eentje voor het blauwe, het groene, het rode en het infrarode deel van het licht. Beeldvormende sensoren kunnen al naargelang het deel van het spectrum waarin ze metingen verrichten opgedeeld worden in optische (inclusief thermisch-infrarode) of radar sensoren.
Passieve en Actieve sensoren
Traditioneel wordt er in teledetectie een onderscheid gemaakt tussen actieve en passieve sensoren. Passieve sensoren maken gebruik van het natuurlijk aanwezige “licht”. Ze meten m.a.w. de elektromagnetische straling die objecten door het aardoppervlak gereflecteerd of uitgezonden wordt. Dit kan bijvoorbeeld gaan om nabij-infrarode straling afkomstig van de zon en gereflecteerd door een boom of om thermisch-infrarode straling uitgestraald door slecht geïsoleerde daken.
Actieve sensoren daarentegen gebruiken hun eigen energie om een deel van het aardoppervlak te “verlichten”. De uitgezonden straling die terugkeert naar de sensor na interactie met objecten dient dan als basis voor de waarneming. Actieve sensoren maken gebruik van bepaalde microgolven (radar) of van het zichtbare en nabij-infrarode licht (bvb. laser afstandsmeter, LiDAR). Naarmate sensortechnologie evolueert is het niet ondenkbaar dat de grenzen tussen actieve en passieve sensoren zullen vervagen door integratie van beide methoden.
Deze twee soorten sensoren worden verder toegelicht in onderdeel 2.2.2. Belangrijkste soorten instrumenten.
Hoek- en afstandszichtsensoren
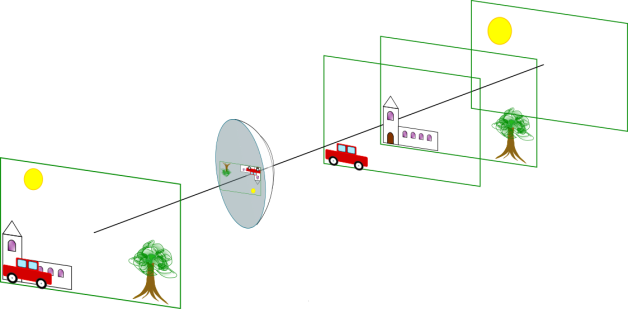
Een optisch instrument werkt als het menselijk oog en heeft een hoekzicht. Hierdoor is het mogelijk om objecten te onderscheiden die zich onder verschillende hoeken bevinden, ongeacht de afstanden waarop deze zich bevinden. Een actief instrument, zoals radar, meet daarentegen afstanden en geen hoeken. Daarom worden twee objecten die zich op dezelfde afstand van de sensor bevinden in dezelfde beeldpixel afgebeeld, zelfs als ze zich onder verschillende hoeken t.o.v. de sensor bevinden.
 |
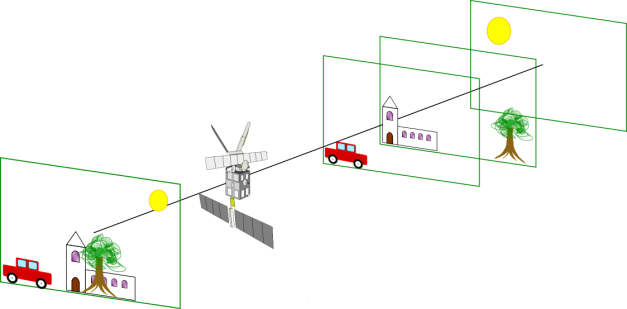 |
Geschematiseerd hoekzicht en afstandszicht - © Dominique Derauw
Dit verschil in beeldacquisitie leidt tot verschillende soorten van vervormingen voor de twee methoden. Optische beelden lijken voor ons natuurlijker omdat ze zijn verkregen door systemen die vergelijkbaar zijn met het menselijk oog. Aan de andere kant lijken RADAR-beelden voor ons vervormd. Beide opnamemethoden moeten echter uiteindelijk worden gecorrigeerd om de verkregen beelden op een gemeenschappelijk kaartsysteem te kunnen projecteren.
Across-track en Along-track sensoren
In tegenstelling tot fotografische (analoge) opnamen maken digitale teledetectiesystemen gebruik van scanners. Een scanner bestaat uit beeldvormende sensoren met een smal zichtveld (eng.: Instantaneous Field of View – IFOV) dat het terrein systematisch aftast. Zo stellen de sensoren een tweedimensionaal beeld samen van het aardoppervlak voor een bepaalde strook (eng.: swath) onder het vliegtuig of de satelliet. Dergelijke scan kan op twee manieren gebeuren: dwars op de vluchtroute (whiskbroom) of er langsheen (pushbroom).
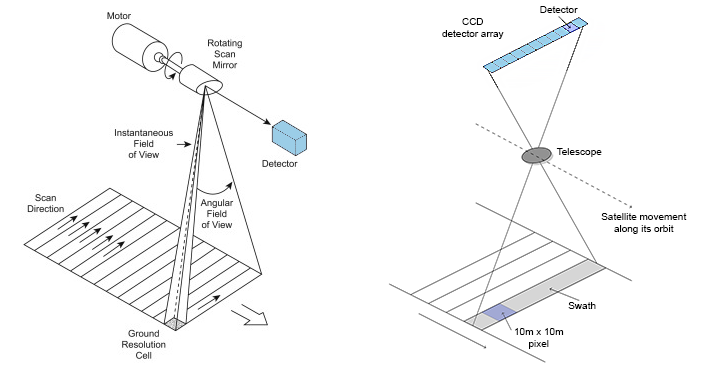
Twee scanningsmethoden : overheen de vliegroute (A) en langsheen de vliegroute (B).
Bron: William Emery, Adriano Camps, Introduction to Satellite Remote Sensing,Elsevier, 2017, ISBN 9780128092545,
Scanners die dwars op de vliegrichting werken scannen het aardoppervlak in een reeks lijnen die loodrecht op de bewegingsrichting van het platform liggen. Een roterende spiegel beweegt het zichtveld van de ene kant naar de andere kant van de sensor terwijl ondertussen het platform zijn koers vervolgt. Opeenvolgende scanlijnen vormen zo een tweedimensionaal beeld van de aarde. De sensoren van de eerdere Landsat satellieten maakten gebruik van deze scantechniek. Hoewel de kalibratie eenvoudiger was, bleek de kwetsbaarheid van de snel bewegende onderdelen het grote nadeel te zijn van dit ontwerp. Na problemen met een defecte scanlijn corrector aan boord van Landsat-7, werden opvolgers 8 en 9 voorzien van een pushbroom systeem dat langsheen de vliegroute scant. Dergelijke systemen maken ook gebruik van de voorwaartse beweging van het platform om opeenvolgende lijnen te scannen die loodrecht op de vliegrichting liggen. In plaats van een bewegende spiegel die enkele detectoren over het terrein beweegt is er een groot aantal gealigneerde vaste detectoren die de hele strook ineens kunnen waarnemen. Dergelijk systeem is lichter en de detectoren blijven langer waarnemen boven een bepaald gebied, maar het is moeilijker te kalibreren. Ook de Europese collega’s van Landsat, de Sentinel-2 satellieten, maken gebruik van een dergelijk systeem.