

IV - DES DONNéES à L'INFORMATION
4- COMMENT ANALYSER les images pour produire des cartes?
4.1- Comment mesurer l'élévation?
Une application importante de la télédétection est la création de modèles numériques d'élévation, çàd des fichiers représentant l'altitude du terrain. Ces modèles peuvent être créés de plusieurs manières : en utilisant des techniques photogrammétriques appliquées à des photographies aériennes stéréoscopiques ou à des images satellitaires, en utilisant des nuages de points LiDAR ou en utilisant l'interférométrie radar.
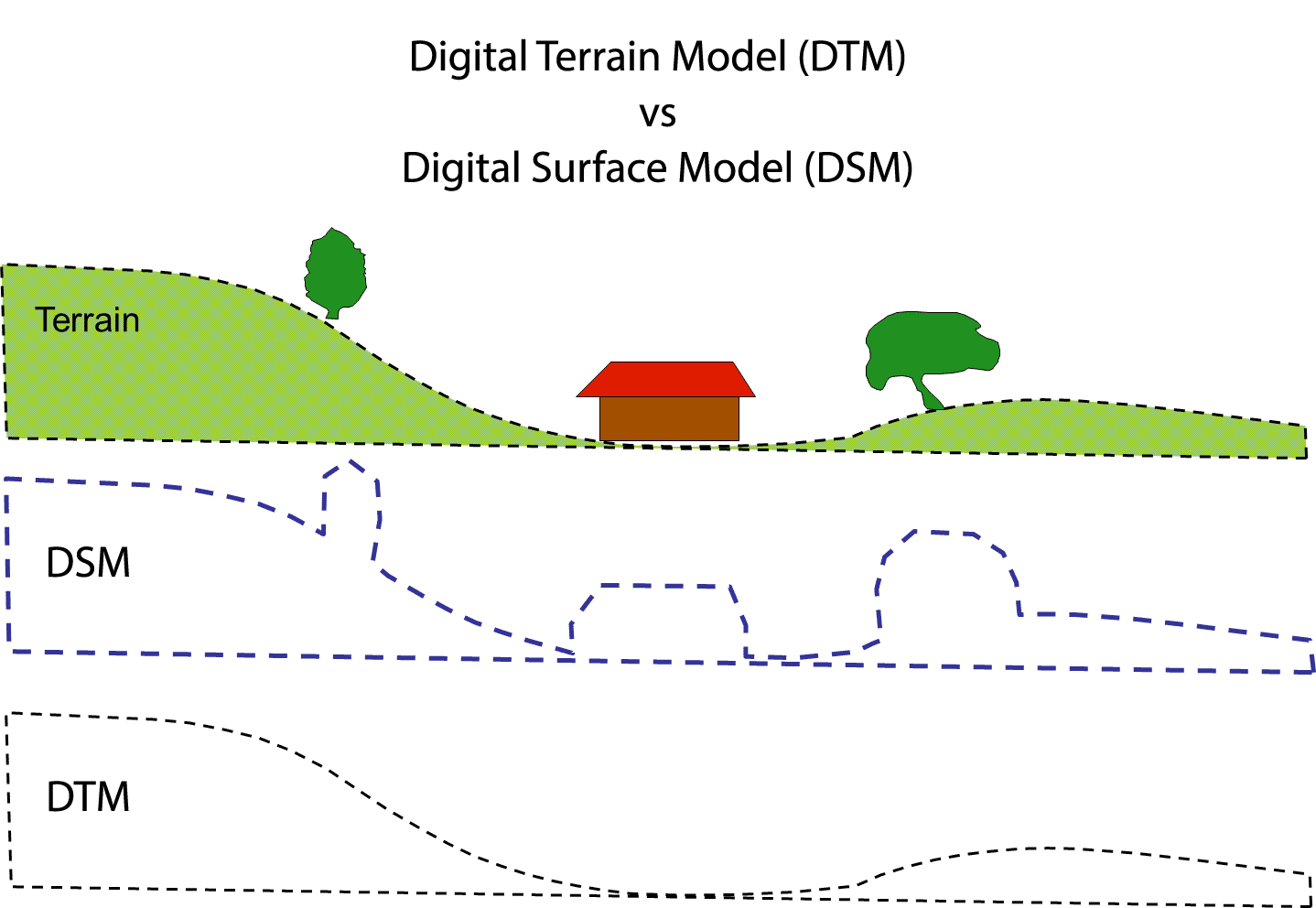 Modèle numérique de terrain (DTM) vs modèle numérique de surface (DSM) en présence d'arbres et de bâtiments.
Modèle numérique de terrain (DTM) vs modèle numérique de surface (DSM) en présence d'arbres et de bâtiments.
Source: Master Géographies Numériques - Université Jean Monnet Saint-Etienne
Nous pouvons modéliser la hauteur soit de la surface du sol nu, soit de la surface du terrain, en ce compris tout ce qui se trouve au-dessus du sol (arbres, bâtiments et tous les autres objets naturels ou artificiels). Dans le premier cas, on parle de modèles numériques de terrain ou MNT (en anglais Digital Terrain Model, DTM), dans le second de modèles numériques de surface ou MNS (en anglais : Digital Surface Models, DSM). Le terme "Modèle numérique d'élévation", ou "Modèle numérique d'altitude" (en anglais Digital Elevation Model, DEM) peut être considéré comme un terme générique mais est, dans la plupart des cas, utilisé comme synonyme de MNT (DTM).
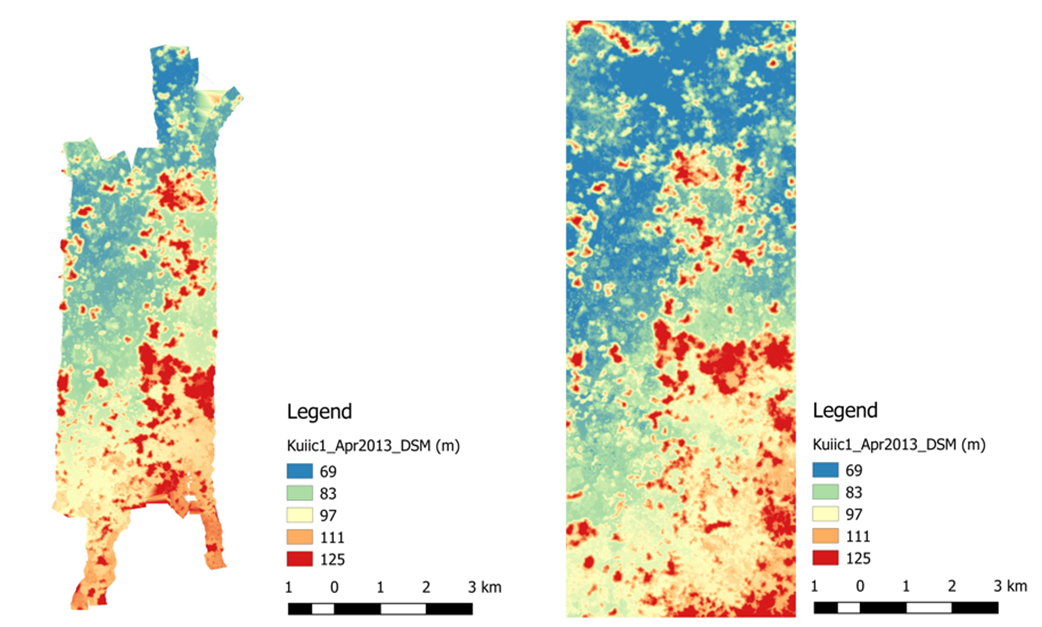
Modèles numériques de surface, à gauche, dérivé de nuages de points LiDAR enregistrés depuis un avion et, à droite, basé sur des images stéréoscopiques du satellite Pléiades. Il s’agit dans les deux cas de fichiers matriciels dont chaque cellule représente l'altitude (en mètres au-dessus du niveau de la mer) de la surface, y compris les objets qui s'y trouvent. Dans ce cas, le nuage de points LiDAR couvre moins de surface que l'image satellite (localisation : Kiuic, Yucatan, Mexique). Réalisés dans le cadre du projet STEREO III LIMAMAL (voir Le monde perdu des Mayas révélé par les satellites).
Il existe trois types de données de télédétection permettant de créer des modèles numériques d'élévation:
Images stéréoscopiques
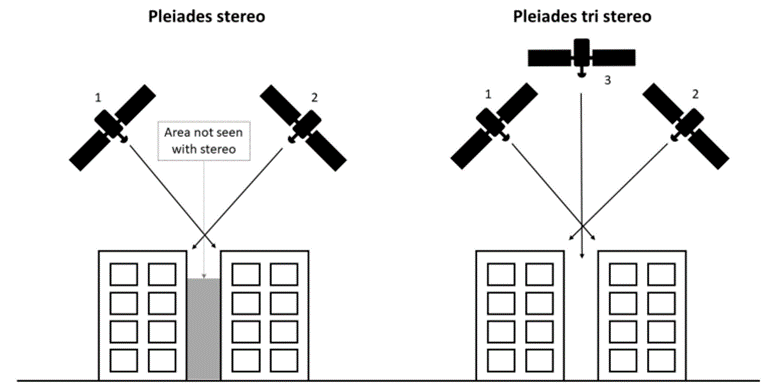
Les images satellites ou les photographies aériennes stéréoscopiques sont des images d'une même zone prises sous différents angles de vue. Les objets d'une certaine hauteur (bâtiments, arbres,...) situés dans les parties superposées des images semblent changer de direction dans une image par rapport à l'autre.
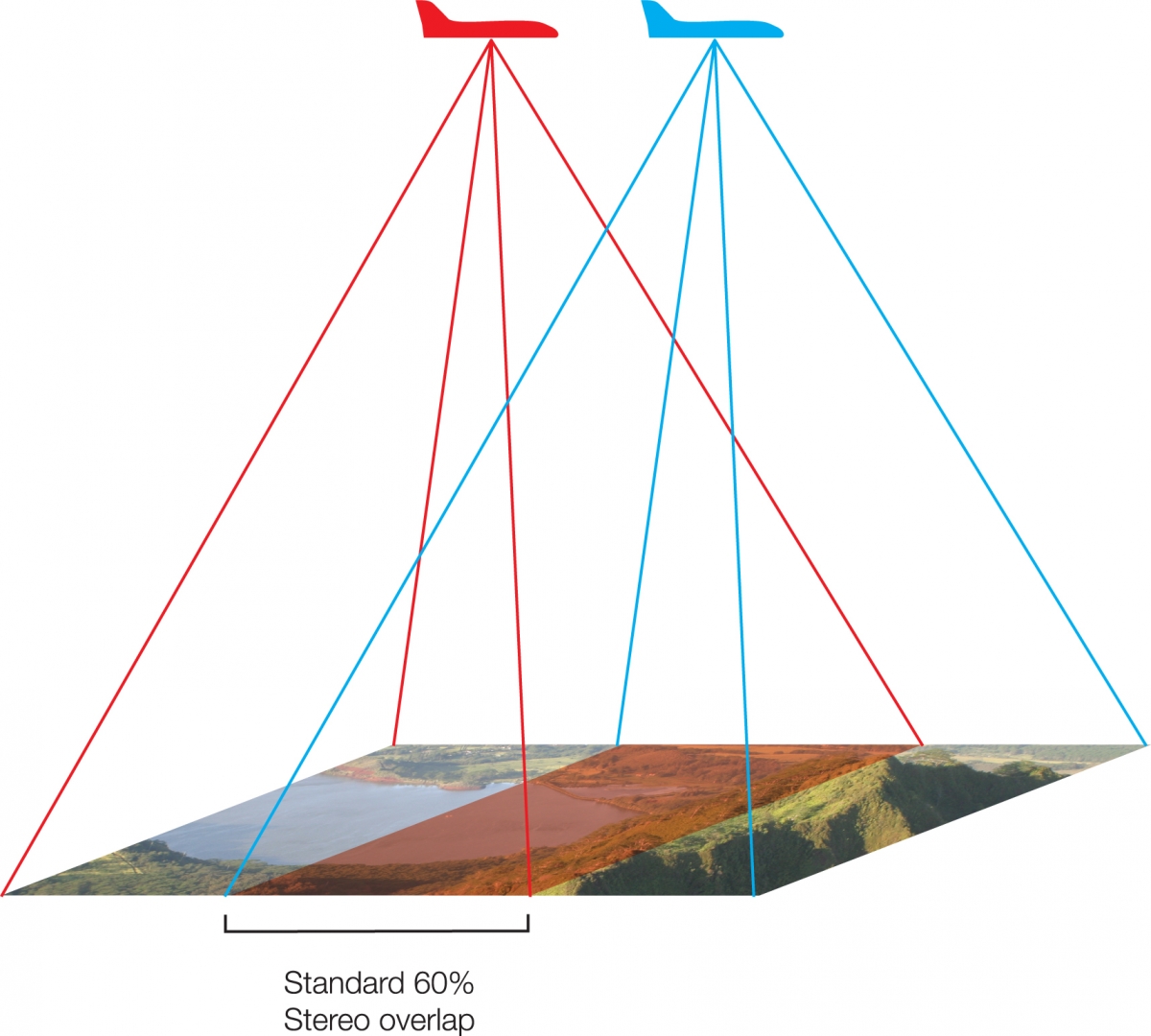
Les images aériennes stéréoscopiques sont acquises en planifiant les lignes de vol de manière à ce qu'il y ait un chevauchement entre deux prises de vue consécutives (zone rouge sur la figure). Ces images sont appelées paires stéréoscopiques. © Commonwealth of Australia - Intergovernmental Committee on Surveying and Mapping - Fundamentals of Mapping.
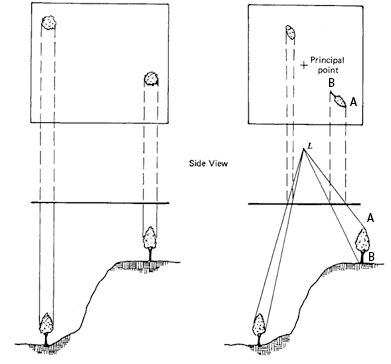
Ce déplacement apparent, appelé parallaxe, se produit en raison des différences de direction de vision. En raison de la perspective, le sommet d’un objet est dès lors toujours décalé par rapport à sa base. En reliant le sommet et la base de l'objet par une ligne sur chaque image du couple stéréoscopique, la parallaxe peut être mesurée. Avec les bonnes formules et quelques points de référence, il est ensuite possible de calculer la hauteur des objets en fonction de la parallaxe.
|
|
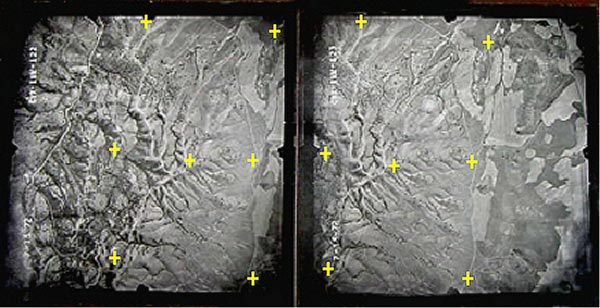
Maintenant que nous savons comment calculer la hauteur d'un point donné sur des images stéréoscopiques, nous pouvons créer un modèle numérique d’élévation. Pour ce faire, nous recherchons , dans la zone de chevauchement des deux images, des objets ou des points particuliers que nous pouvons identifier séparément sur chaque image.
Ces points de rattachement (en anglais tie points) peuvent être identifiés visuellement mais il existe heureusement aujourd'hui des logiciels capables de déterminer automatiquement et rapidement un grand nombre de ces points et d’en calculer les coordonnées en trois dimensions (x, y, z). Les valeurs de ce "nuage de points" peuvent être interpolées vers une matrice à partir de laquelle une image numérique peut être créée et utilisée dans un système d'information géographique.
Source: Photogrammetry Methods at the Utah Geological Survey: From Field Mapping to Published Map
Balayage laser aéroporté
Une autre façon d'obtenir un nuage de points 3D est le balayage laser aéroporté (voir Représentation de données LiDAR). Cette méthode implique généralement l'utilisation d'un scanner laser à impulsions embarqué à bord d'un avion, associé à des dispositifs de précision qui déterminent la position et l'orientation de l'avion.
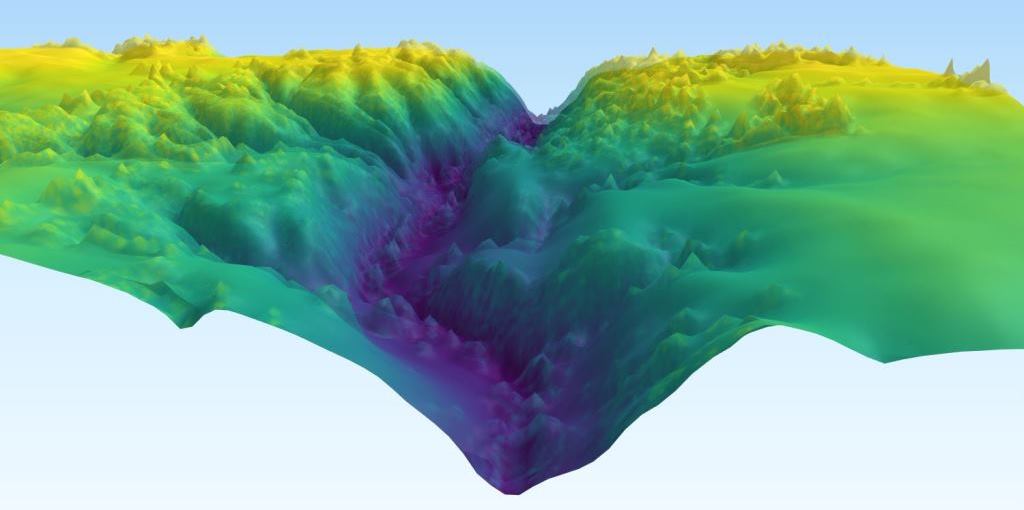
Vue en perspective d'un modèle numérique de surface d'une vallée fluviale boisée dans le centre de l'Iowa, aux États-Unis, dérivé de données LiDAR Source : Lidar-derived digital surface and elevation models of a stream channel (USGS)
Les impulsions lumineuses (souvent infrarouges) émises par le scanner laser rebondissent sur le terrain et sont détectées en retour par un récepteur. Des composants électroniques très précis mesurent le temps que mettent les impulsions pour atteindre celui-ci. La distance entre le scanner et l'objet peut alors être facilement calculée en multipliant le temps mesuré par la vitesse de la lumière et en divisant le résultat par 2 (l'impulsion fait en effet un aller-retour).
Pour avoir un ordre d’idée, la lumière met environ 3,3 picosecondes (3,3 x 10-12 sec) pour parcourir 1 mm. Le scanner est doté d'un miroir à rotation rapide qui peut réfléchir un réseau ponctuel et dense de faisceaux laser sur le terrain pendant que l'avion suit son vol. Un nuage de millions de points 3D est ainsi créé qui peut être transformé en un modèle numérique d'élévation très détaillé.
Interférométrie radar
La 3e méthode d’obtention de modèles d'élévation utilise l'interférométrie radar. Les capteurs radar sont des capteurs actifs, c'est-à-dire que, comme le LiDAR, ils émettent une onde lumineuse qui est partiellement réfléchie par le terrain et ensuite recapturée par un récepteur (voir Images radar). Les signaux RADAR ou SAR (Synthetic Aperture Radar ou radar à synthèse d’ouverture) sont caractérisés par une amplitude (la force du signal) et une phase (la fraction d'une seule longueur d'onde SAR), qui est principalement déterminée par la distance entre le capteur et les objets au sol. Contrairement au LiDAR, le signal SAR ne permet pas de déterminer la distance par rapport au terrain en fonction du temps écoulé. Si nous disposons de deux ou plusieurs images SAR de la même zone, prises à partir de capteurs situés à des positions légèrement différentes (ce que l'on appelle la ligne de base), il est toutefois possible de déterminer les changements d'altitude à partir des différences de phase.
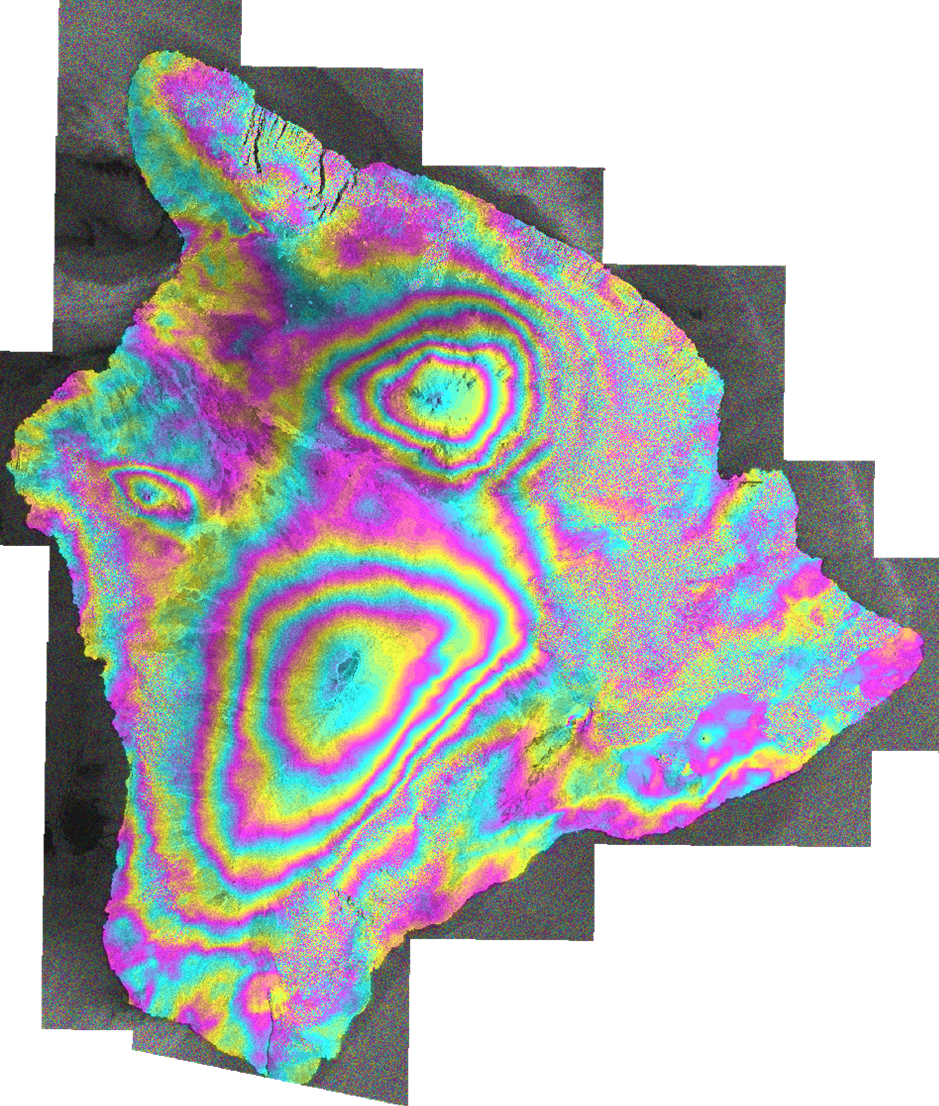
Cet interférogramme de Hawai (Kilauea) a été réalisé à partir de deux images SAR Sentinel-1 enregistrées le 26/11/2020 et le 2/12/2020. Les franges montrent qu'il y a eu une activité volcanique entre ces deux dates. Entre deux anneaux de même couleur, il y a un changement de hauteur de terrain de 3 cm.
Les deux images SAR, qui forment ce que l'on appelle une paire interférométrique, peuvent soit être enregistrées simultanément à partir de deux capteurs situés à une certaine distance l'un de l'autre, soit par deux enregistrements successifs du même capteur à partir de positions légèrement différentes. Dans les deux cas, un interférogramme est obtenu à partir des différences de phase, qui sont visibles sous forme de franges représentées dans l'ordre des couleurs de l'arc-en-ciel. Une phase complète correspond à une longueur d'onde complète (par exemple 6 cm pour Sentinel 1), à diviser par deux car le signal fait un aller-retour. Si des changements de hauteur du terrain se sont produits entre deux prises de vue consécutives (par exemple, un affaissement du sol), ils peuvent également être observés.
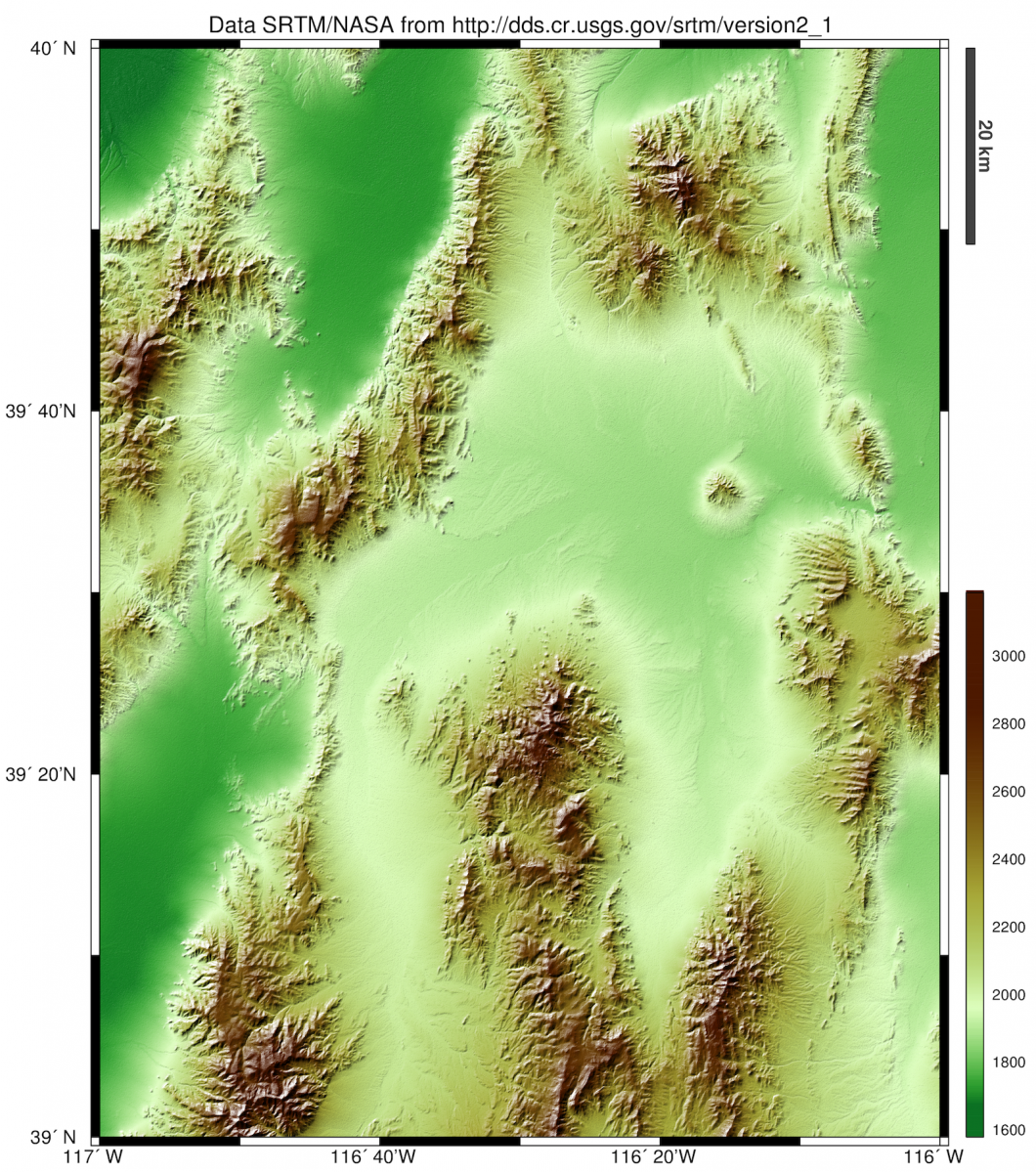
Ce modèle numérique d'élévation a été créé par la Shuttle Radar Topography Mission. Ce système radar était composé de deux antennes distantes l’une de l’autre à bord de la navette spatiale Endeavour. L'objectif était de créer un modèle numérique d'élévation d'une grande partie de la Terre. Source: Example of relief map from SRTM1 data (central Nevada, near US-50) - Wikimedia Commons