

IV - VAN DATA TOT INFORMATIE
4- HOE KUNNEN WE BEELDEN ANALYSEREN EN KAARTEN PRODUCEREN?
4.1- Hoe kunnen we de terreinhoogte meten?
Een belangrijke toepassing van teledetectie is het opstellen van digitale hoogtemodellen, bestanden die de hoogte van het terrein weergeven. Zulke modellen kunnen op verschillende manieren gemaakt worden: door gebruik te maken van fotogrammetrische technieken die toegepast worden op stereoscopische luchtfoto’s of satellietbeelden, d.m.v. LiDAR puntenwolken of a.d.h.v radar interferometrie.
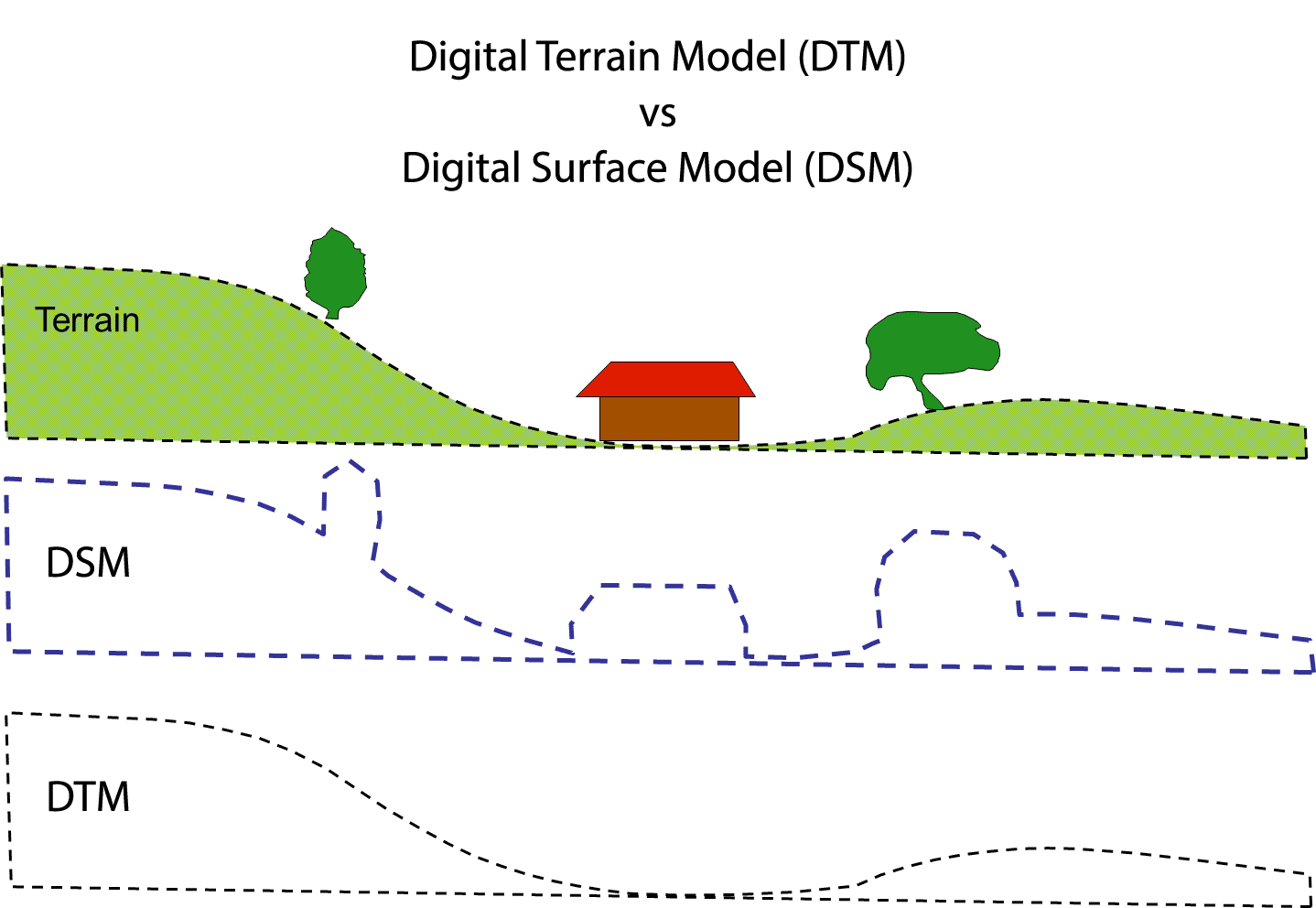 Digitaal Terrein Model (DTM) vs Digitaal Oppervlaktemodel (DSM) in aanwezigheid van bomen en gebouwen.
Digitaal Terrein Model (DTM) vs Digitaal Oppervlaktemodel (DSM) in aanwezigheid van bomen en gebouwen.
Bron: Master Géographies Numériques - Université Jean Monnet Saint-Etienne
We kunnen ofwel de hoogte van het naakte grondoppervlak modelleren ofwel de hoogte van het grondoppervlak inclusief alles wat er zich daarbovenop bevindt (bomen, gebouwen en alle andere natuurlijke of artificiële objecten). Het eerste noemen we digitale terreinmodellen (DTM), het tweede digitale oppervlakte modellen (eng.: digital surface models, DSM). De term “Digitaal hoogtemodel” kunnen we dan beschouwen als een generieke term, maar wordt in de meeste gevallen gebruikt als synoniem voor DTM.
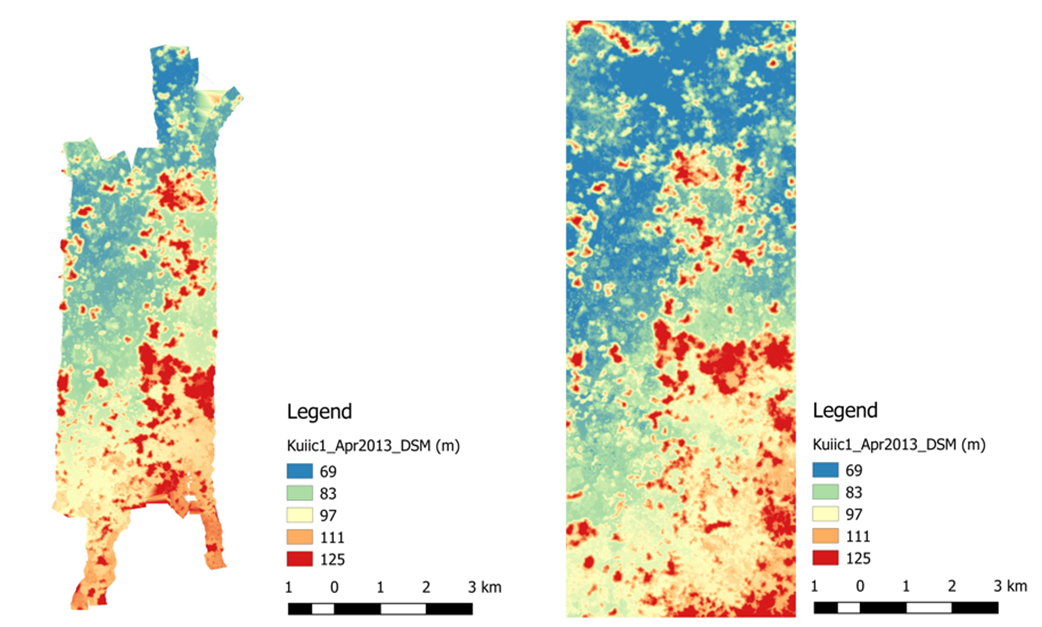
Digitale oppervlaktemodellen afgeleid uit LiDAR puntenwolken opgenomen vanuit een vliegtuig (links) en op basis van stereoscopische Pléiades satellietbeelden (rechts). Beide zijn rasterbestanden waarvan elke cel de hoogte weergeeft (in meter boven zeeniveau) van het oppervlak inclusief de objecten die zich daarop bevinden. De lidarpuntenwolk is in dit geval minder gebiedsdekkend dat het satellietbeeld (locatie: Kiuic, Yucatan, Mexico). Gerealiseerd in het kader van het STEREO III LIMAMAL-project (zie De verdwenen wereld van de Maya's onthuld door satellieten)
Er zijn drie soorten teledetectiegegevens waarmee we digitale hoogtemodellen kunnen maken: stereoscopische beelden, laser scanninggegevens vanuit de lucht en RADAR inerferometriegegevens.
Stereoscopische satellietbeelden
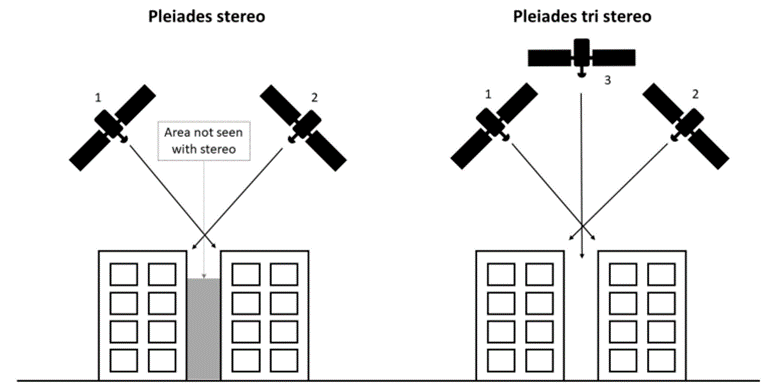
Stereoscopische satellietbeelden of luchtfoto’s zijn opnamen die vanaf verschillende invalshoeken van eenzelfde gebied gemaakt worden. Objecten met een bepaalde hoogte (gebouwen, bomen,…) die zich in de overlappende delen van de beelden bevinden lijken van richting veranderen in het ene beeld ten opzichte van het andere.
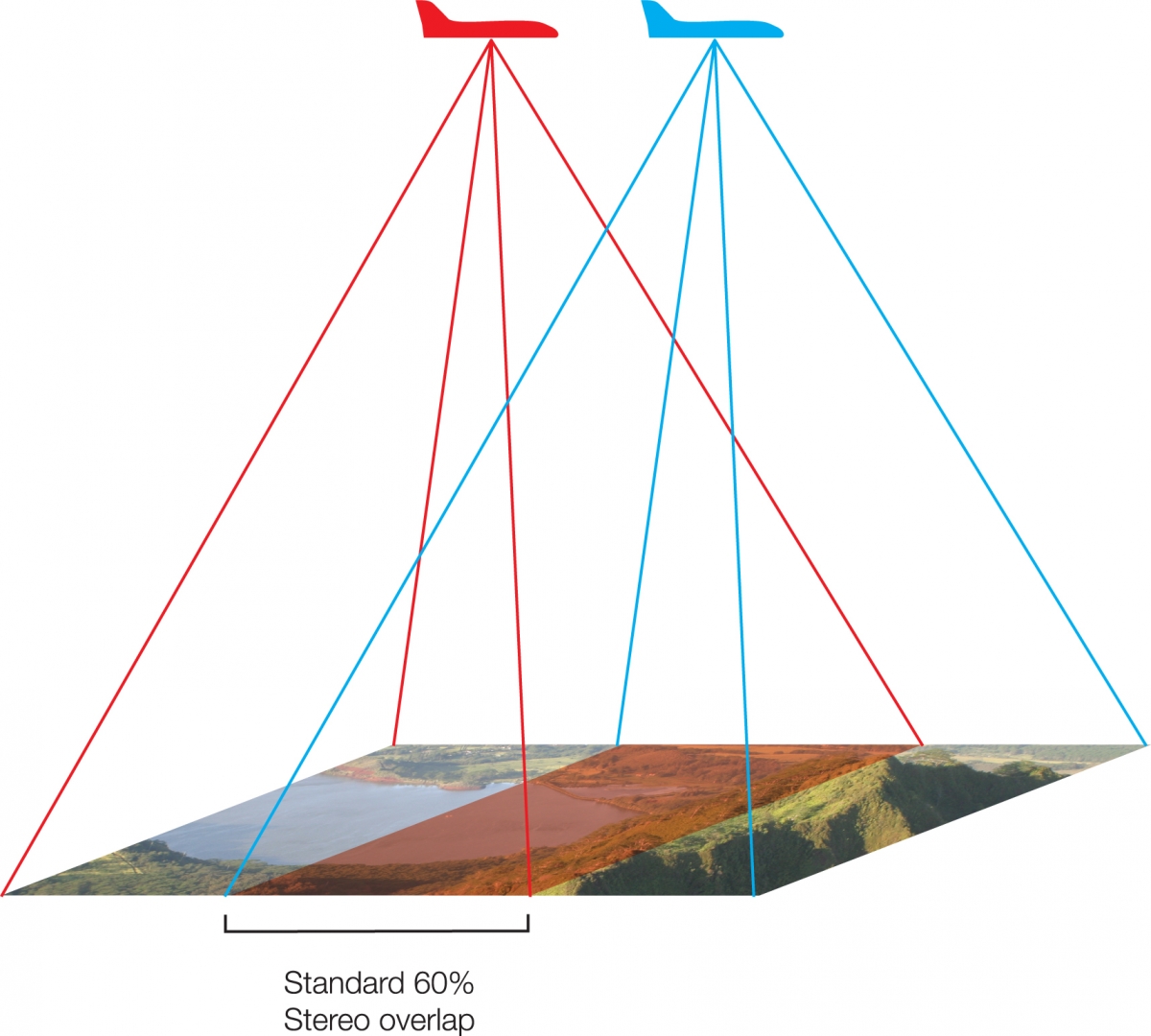
Stereoscopische luchtbeelden worden opgenomen door de vluchtlijnen zodanig te plannen dat er een overlap ontstaat tussen twee opeenvolgende opnamen (rood gedeelte op de figuur). Dergelijke foto’s noemt men een stereopaar. © Commonwealth of Australia - Intergovernmental Committee on Surveying and Mapping - Fundamentals of Mapping.
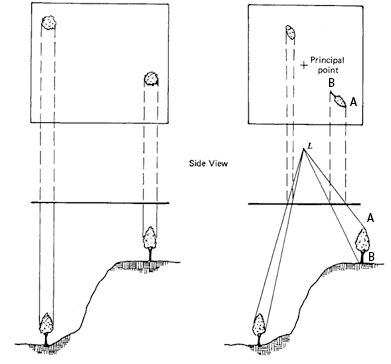
Deze schijnbare verplaatsing of parallax ontstaat omwille van verschillen in de kijkrichting. Omwille van het perspectief zullen de toppen van objecten op een beeld altijd verschuiven ten opzichte van hun basis. We kunnen de top en de basis van het object verbinden met een lijn op elk beeld van het stereopaar en zo de parallax meten. Met de juiste formules en enkele referentiepunten kunnen we op basis van de parallax de hoogte van de objecten berekenen.
|
|
|
Nu we weten hoe we de hoogte van één bepaald punt op stereoscopische beelden kunnen berekenen, kunnen we een digitaal hoogtemodel maken. Hiervoor zoeken we naar objecten of bepaalde plekken in het overlappende gebied van beide beelden die we op elk beeld afzonderlijk kunnen identificeren.
Deze bindpunten (eng.: tie points – gele kruisen op de luchtfoto) kunnen visueel bepaald worden maar gelukkig is er tegenwoordig software die voor ons een groot aantal van deze punten snel kan bepalen. De software berekent dan automatisch de coördinaten in drie dimensies (x,y,z). Uit deze “puntenwolk” kunnen we waarden interpoleren naar een raster waar we tenslotte een digitale rasterafbeelding van kunnen maken die gebruikt kan worden in een geografisch informatiesysteem.
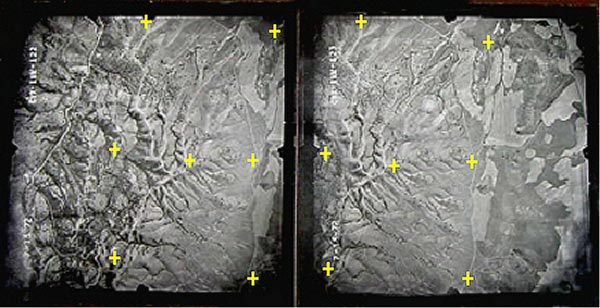
Bron: Photogrammetry Methods at the Utah Geological Survey: From Field Mapping to Published Map
Laserscanning vanuit de lucht
Een andere manier om een 3D puntenwolk te bekomen is door middel van laserscanning vanuit de lucht (zie Weergave van lidar data). Meestal wordt er dan gebruik gemaakt van een puls-gebaseerde laserscanner die aan boord van een vliegtuig wordt gebracht in combinatie met nauwkeurige toestellen die de positie en oriëntatie van het vliegtuig bepalen.
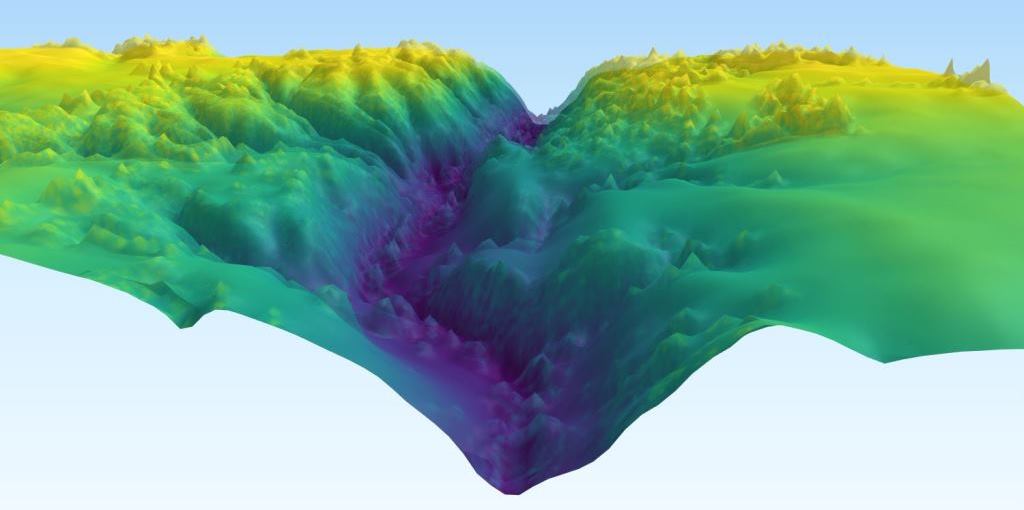
Perspectiefweergave van een digitaal oppervlaktemodel van een beboste riviervallei in centraal Iowa, VS, afgeleid van LiDAR-gegevens. Bron : Lidar-derived digital surface and elevation models of a stream channel (USGS)
De lichtpulsen (vaak infrarood) die de laserscanner uitzendt weerkaatsen op het terrein en worden terug waargenomen door een ontvanger. Zeer nauwkeurige elektronica meet de tijd die de pulsen daar over doen. De afstand van de scanner tot het object kan dan eenvoudig berekend worden door de gemeten tijd te vermenigvuldigen met de lichtsnelheid en het resultaat te delen door 2 (de puls gaat immers heen en terug).
Om je een idee te geven: het duurt voor het licht ongeveer 3,3 picoseconden (3,3 x 10-12 sec) om 1 mm af te leggen. De scanner beschikt over een snel roterende spiegel die een dicht puntennetwerk van laserstralen op het terrein kan weerkaatsen terwijl het vliegtuig verder vliegt. Zo ontstaat een 3D puntenwolk bestaande uit miljoenen punten die verwerkt kan worden tot een zeer gedetailleerd digitaal hoogtemodel.
Radarinterferometrie
Tenslotte kunnen we ook hoogtemodellen afleiden door gebruik te maken van radarinterferometrie. Radarsensoren zijn actieve sensoren, d.w.z. dat ze net zoals LiDAR zelf een lichtgolf uitzenden die door het terrein gedeeltelijk wordt weerkaatst en dan terug opgevangen wordt door een ontvanger (zie Radar beelden). Radar of SAR (synthetic aperture radar) signalen worden gekenmerkt door een amplitude (de sterkte van het signaal) en een fase (de fractie van een enkele SAR golflengte), die voornamelijk bepaald wordt door de afstand tussen de sensor en de objecten op de grond. In tegenstelling tot met LiDAR kunnen we met een SAR signaal niet op basis van de verlopen tijd de afstand tot het terrein bepalen. Indien we beschikken over twee of meerdere SAR opnames van hetzelfde gebied, genomen vanuit licht verschillende sensorposities (de zg. baseline), dan kunnen we wel uit de faseverschillen de veranderingen in hoogte bepalen.
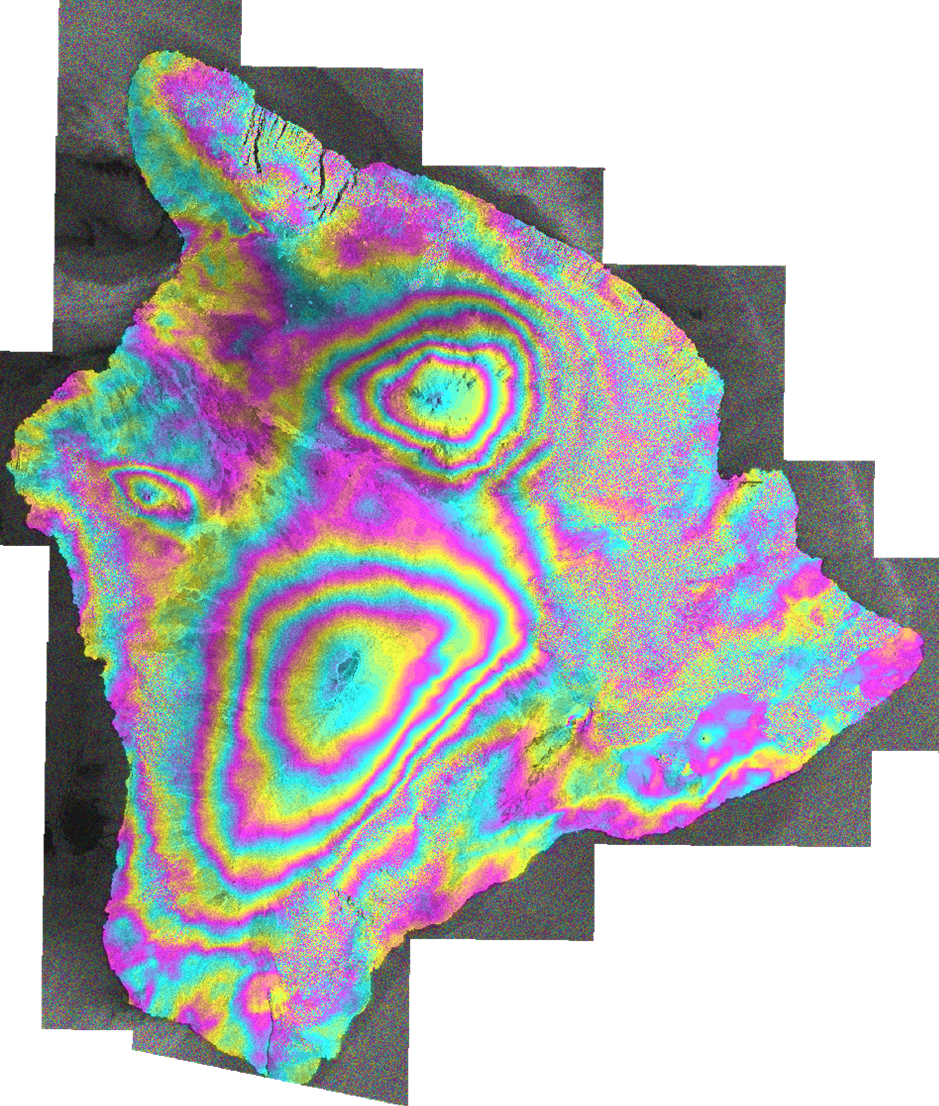
Op dit interferogram van Hawai (Kilauea) op basis van twee Sentinel 1 SAR beelden opgenomen op 26/11/2020 en 2/12/2020 tonen de fringes aan dat er vulkanische activiteit was tussen de opnamen. Tussen twee ringen van dezelfde kleur is er een verandering van terreinhoogte van 3cm.
De twee SAR beelden die het zogenaamde interferrometrisch paar vormen zouden tegelijk opgenomen kunnen worden vanuit twee sensoren die zich op een bepaalde afstand van mekaar bevinden maar evenzeer door twee opeenvolgende opnames vanuit een licht verschillende positie. In beide gevallen wordt er een ruimtelijk beeld of interferogram gemaakt van de faseverschillen, die zichtbaar worden gemaakt als fringes in de volgorde van de kleuren van de regenboog. Een volledige fase komt overeen met een volledige golflengte (bvb. 6cm voor Sentinel 1), te delen door twee omdat het signaal heen en terug gaat. Indien er tussen twee opeenvolgende opnamen veranderingen in de hoogte van het terrein zijn gebeurd (bvb. grondverzakkingen) dan kunnen die ook waargenomen worden.
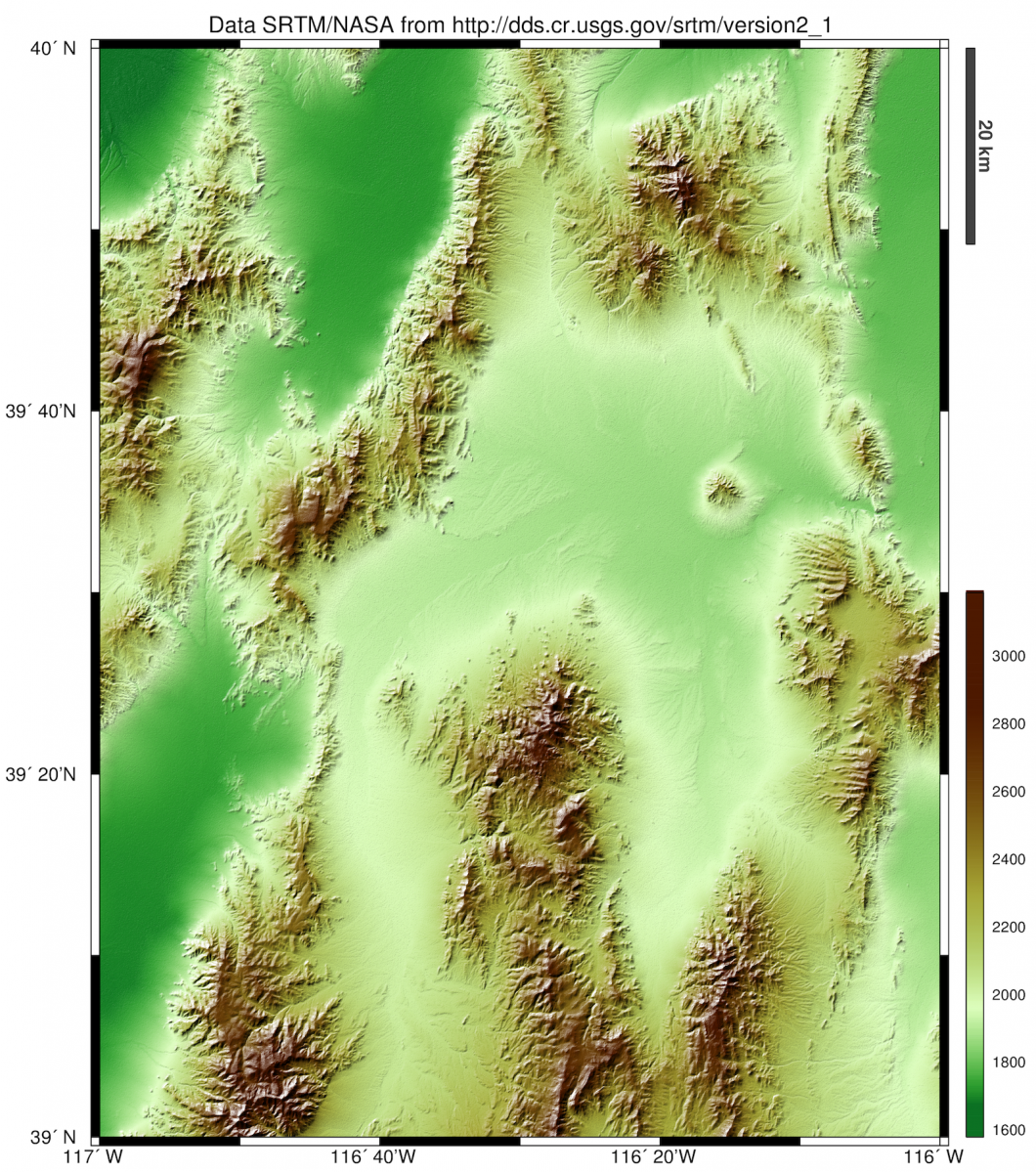
Dit digitaal hoogtemodel werd gemaakt door de Shuttle Radar Topography Mission. Dit radarsysteem bestond uit twee antennes die op een afstand uit mekaar geplaatst werden aan boord van de spaceshuttle Endeavour. Het doel was een digitaal hoogtemodel van een groot deel van de aarde te maken. Bron: Example of relief map from SRTM1 data (central Nevada, near US-50) - Wikimedia Commons